Tecnologia do motor:
A maioria dos novos E-bikers não se preocupam com os detalhes dentro dos motores que montamos, desde que apenas funcionem. Mas, ocasionalmente, usamos termos em nossos artigos para descrever algumas características sobre motores elétricos, e queremos que nossos leitores entendam por que uma escolha é melhor do que outra para uma determinada aplicação.
imãs permanentes e eletroímãs
Um imã permanente (PM) é bastante fácil de entender. É um pedaço de metal que parece ser magnético o tempo todo, mas é desenhado apenas em metais ferrosos, o que significa metais que têm ferro neles (como o aço). Existem apenas três tipos de ímãs permanentes que você provavelmente conhece nos motores E-bike: Ferric, Samarium-Cobalt e Neodymium.
Alguns anos atrás, alguns dos motores mais pequenos e de baixo preço usavam os ímãs ” Ferrite ” bastante fracos que geralmente são de cor cinza escuro. O motor Kollmorgen é um exemplo. Estes ímãs baratos podem ainda ser ocasionalmente encontrados em veículos eletrônicos para crianças.
Os ímãs Samarium-Cobalt foram desenvolvidos na década de 1970, e eles são muito tolerantes ao calor. Eles mantêm sua potência magnética total (medida em Gauss ) quando são expostos a temperaturas próximas à temperatura de Curie de 800C (1.400 F). No entanto, eles são caros devido à necessidade de usar Cobalto, então … o desejo de ímãs permanentes fortes que foram menos dispendiosos nos levou ao desenvolvimento de neodímios em 1982.
Os ímãs de neodímio são o avanço que realmente permitiu que o boom das E-bikes ocorresse cerca de uma década atrás no início dos anos 2000. Neo’s tem estado por um tempo, mas eles costumavam ser muito caros. Quando o boom em discos rígidos do computador ocorreu, a indústria de computadores precisava de um íman mais forte para empacotar em unidades cada vez menores que tinham que armazenar mais informações. A produção em massa de ímãs neo para computadores diminuiu o preço e, em seguida, os fabricantes de pequenos motores magnéticos permanentes começaram a usar ímãs de neodímio para produção em massa.
Para entender as características de calor de ímãs neo, pode ser útil explicar como os ímãs permanentes são feitos . O material de base é feito e moldado, e então deve ser aquecido até uma temperatura acima da sua “Curie Temperature”. Esta é a temperatura em que os átomos individuais estão em um estado de energia quando podem girar e girar livremente sem serem afetados pela orientação magnética de seus átomos vizinhos.
Neste ponto, o material quente é submetido a um campo magnético muito forte que é produzido por um eletroímã que está posicionado perto dele. Então … enquanto o campo eletromagnético ainda está energizado, o material é arrefecido. Como resultado, todos os átomos (cada um sendo um pequeno ímã em si), têm todos os seus campos magnéticos alinhados na mesma direção e, de fato, todos estão congelados no lugar, enquanto ainda estão apontando na mesma direção.
A temperatura de Curie de alto teor de neodímio (com terbium e disprósio adicionados) é de 320C / 600F. No entanto, os ímãs neo comuns são feitos a partir do grau mais barato, e podem começar a perder algum do seu magnetismo em torno de 80C (170F).
Os ímãs do motor E-bike são um grau que é ligeiramente superior à variedade mais barata, porque eles geralmente são submetidos a temperaturas mais altas do que deveriam ser por clientes desavisados. Anos de experimentos publicados por E-bikers reais em esfera sem fim produziram uma regra de polegar comum para evitar o aquecimento do seu motor E-bike acima de 95C (200F).
Se o seu motor sente que perdeu algum poder, e agora também tem uma velocidade máxima ligeiramente superior … você provavelmente superaqueceu seus ímãs … e não há como consertar isso.
Claro, a nossa experiência nos ensinou que, se um motor é completamente frio em todas as condições, provavelmente é um pouco maior, mais pesado e mais caro do que o necessário para o trabalho que é dado. E … na outra extremidade da escala, se você não consegue segurar sua mão em um motor porque está muito quente, então você provavelmente está convertendo muitos watts da bateria em um desperdício de calor. Então … qualquer temperatura da temperatura do quarto (durante o modo de cruzeiro), até 60C (140F) durante suas cargas mais pesadas são um ótimo para um design de sistema E-bike.
______________________________________________________
O Dínamo
Dínamo é um termo antigo usado para descrever um gerador que faz corrente de energia continua . A energia CC envia elétrons em apenas uma direção. O problema com um gerador simples é que, quando o rotor gira, ele gira completamente, invertendo a corrente. Os inventores não souberam o que fazer com esta corrente alternada, corrente alternada é mais complexa para controlar e projetar motores e luzes para. Os primeiros inventores tinham que descobrir uma maneira de capturar apenas a energia positiva do gerador, então inventaram um comutador. O comutador é um interruptor que permite que a corrente flua somente em uma direção.
O gerador
O gerador é diferente do dínamo na medida em que produz energia AC . Os elétrons fluem em ambas as direções em corrente alternada. Não foi até a década de 1890 que os engenheiros descobriram como projetar motores potentes, transformadores e outros dispositivos que poderiam usar a energia AC de uma forma que pudesse competir com a energia DC. Enquanto o alternador usa comutadores, o gerador usa um anel deslizante com escovas para tocar a energia do rotor. Anexado ao anel deslizante estão grafite ou “escovas” de carbono que são carregadas por mola para empurrar a escova sobre o anel. Isso mantém o poder fluindo de forma consistente. As escovas se desgastam com o tempo e precisam ser substituídas
Isso nos leva a eletroímãs
Um experimento básico em eletricidade é envolver um fio de cobre em torno de uma unha que é feita de aço (99% de ferro). Quando você aplica eletricidade de corrente direta (DC) através do fio, o prego temporariamente se torna um ímã. Então … quando você desenergizar o fio , o prego deixa de ser um ímã. Os ímãs têm um pólo norte e sul, e você também pode reverter os pólos do ímã, ao reverter as postagens positivas e negativas da bateria que você está usando para fazer o prego um ímã.
Inverter os pólos do mesmo eletroímã (para frente e para trás) é útil para entender, porque é um componente importante de como funcionam alguns motores modernos da E-bike. Uma das leis mais básicas dos ímãs é a seguinte: os pólos opostos são atraídos um para o outro, e os mesmos pólos são repelidos um pelo outro.
Se um PM tiver o seu pólo norte voltado para o exterior, e está localizado de frente para dois eletroímãs que estão lado a lado … você pode ver se o eletroímã à esquerda está energizado para que o pólo norte esteja voltado para o PM e o eletroímã à direita é energizado para que o pólo sul esteja voltado para o PM, o eletroímã esquerdo estará empurrando o PM para a direita ao mesmo tempo em que o eletroímã direito o puxa para a direita.
_____________________________________________________
Drive Direto, Geared ou Mid Drive
Os motores de cubo de direcionamento direto (DD) são tão simples quanto um motor pode ser. Eles são grandes o suficiente para que eles não sejam sigilosos, um pouco pesados, e quando não alimentados têm um pouco de arrastão magnético (chamado de dente ).
Eles continuam relevantes e provavelmente sobreviverão por várias razões. Sua simplicidade mantém o preço baixado, então provavelmente continuarão sendo o kit de bicicleta eletrônica para principiantes mais acessível. Além disso, acima de 30 MPH eles podem manipular mais amplificadores e calor do que os motores de cubo com engrenagens. E o último … quando combinado com um controlador de onda senoidal, eles são praticamente silenciosos.

Os motores de cubo com engrenagem têm um conjunto de engrenagens interno que permite que o motor gire cerca de 5 vezes por cada roda. Isso permite que um motor relativamente pequeno e leve tenha tanto torque quanto um motor de direção direta maior. Uma das razões pelas quais eles são muito populares é que eles incorporam uma embreagem de roda livre interna, então quando você está pedalando sem energia, rola facilmente sem resistência (sem engrenagem).
Estes são os tipos mais populares, para níveis de potência entre 250W-1.200W

A complexidade e a despesa extras de um meio-drive têm benefícios muito específicos. O estilo mais comum permite que o motor use as engrenagens das bicicletas, e esta é uma grande ajuda para dois perfis de usuários. A União Européia (UE) tem um baixo limite de potência de 250W, o que torna muito difícil escalar colinas íngremes. Permitir que um pequeno motor para desacelerar em uma engrenagem inferior seja uma grande melhoria.
O outro usuário que precisa de uma unidade média é alguém que carrega uma carga pesada na bicicleta até subidas íngremes. No entanto, os adeptos mais entusiasmados de drives médios de alta potência foram full-suspension off-roaders …
A unidade de fábrica mais popular foi a unidade Bosch, por uma grande margem. O kit de movimentação média mid-power mais emocionante foi o Bafang BBS02 , e o melhor meio-drive high-powered off-road é o kit Lightning Rods 2800W. A partir de 2016, o 1500W BBSHD tornou-se bastante popular.

Hub redutor de 2 velocidades
Aqui está uma adição tardia, a empresa Xiongda está produzindo um hub de engrenagens de 2 velocidades que poderia ter um grande impacto no mundo da bicicleta elétrica. Possui dois conjuntos de engrenagens internas e o motor avança on-the-fly para encaixar uma engrenagem inferior de “escalada”.
Atualmente, eles possuem apenas um modelo (a partir de 2014), que é uma pequena unidade 500W-max projetada para o mercado europeu. No entanto, se eles já começaram a fazer um hub maior que pode fornecer 750W usando 36V, acredito que será um desenvolvimento muito emocionante para clientes norte-americanos. ( Leia nosso artigo sobre o Xiongda de 2 velocidades aqui )
_____________________________________________________
Escovado e Escova – MENOS
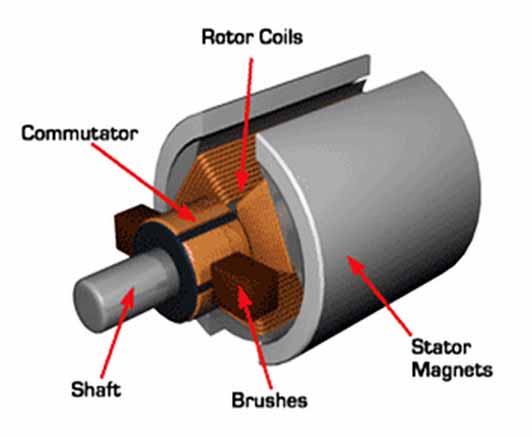
As fábricas industriais usam frequentemente motores de indução (em oposição aos ímãs permanentes). Em um motor de indução, o estator (a parte estacionária) e o rotor (a parte que gira, às vezes chamada de armadura ), são ambos feitos de grupos de eletroímãs. Por isso, o poder para ambos pode ser variado conforme desejado.
Como o rotor gira, temos que adicionar um método energizando e desenergizando as bobinas no rotor enquanto ele está funcionando. Para um motor escovado, isto é realizado por um tipo de contato de comutação que esfrega contra uma das peças giratórias.
As “escovas” são o contato que normalmente está na carcaça do motor estacionário (de modo que a quantidade de desgaste pode ser inspecionada mesmo quando o motor está funcionando, pois, a escova fica mais curta ao longo do tempo), e geralmente são projetados para que sejam fáceis para limpar e substituir conforme necessário. A parte dos contatos escovados que é projetada para durar muito tempo (as superfícies que as escovas esfriam) são tipicamente ligadas ao eixo do rotor, e é chamado de comutador.
A razão pela qual os motores brushLESS são populares com os construtores E-bike DIY é que … mesmo que você possa querer executar 36V em um motor quando você o instala pela primeira vez, usando um motor sem escova permite que você execute esse mesmo motor em muitas tensões diferentes. O hubmotor 9C Direct Drive (DD) é anunciado para ser executado em 36V / 48V, mas … o vencedor Pikes Peak usou 111V em um 9C, sem problemas.
Eu li que os pincéis são bagunçados, eles precisam ser substituídos na ocasião, e são menos eficientes, mas … as escovas são projetadas para uma faixa de tensão específica (as tensões mais altas requerem um espaçamento mais largo) e os construtores DIY querem a liberdade de experimentar e atualizar. Para serem justos, os motores escovados (como o grande Agni) usam controladores que são muito caros do que os controladores sem escova e para alguns construtores, isso continua sendo um benefício significativo.
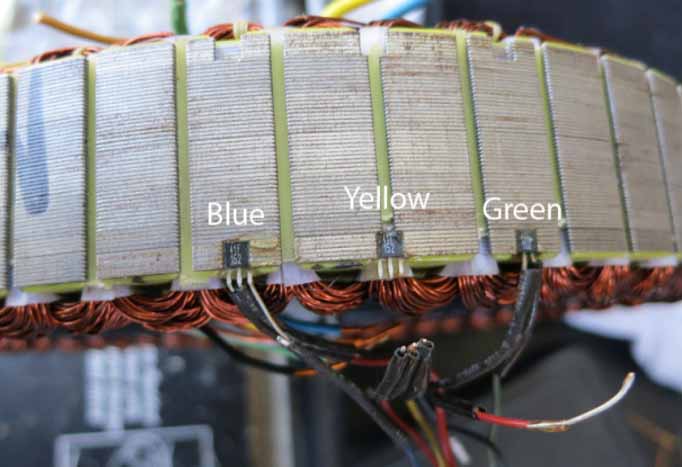
Mas como os controladores de motores sem escova de imã permanente sabem quando ativar e desativar os eletroímãs (no estator) com tempo perfeito? Uma vez que estes são motores trifásicos (todas as bobinas no estator são atribuídas em três grupos de bobinas), existem três sensores de corredor em um motor Ebike sem escova comum.
Cada um dos três sensores de salão tem três pernas (nove pernas no total), e um motor trifásico tem 5 fios de salão. Isso ocorre porque um fio fornece um positivo para todos os três sensores, um fio fornece o solo / negativo para os três sensores e, em seguida, os três fios restantes são para o sinal de ligar / desligar … um fio de sinal para cada sensor. O sinal é um pulso de baixo valor de 5V. Então … 5V são fornecidos a cada perna positiva nos três sensores do corredor e, quando um imã está ao lado do sensor, o 5V passa pelo sensor do salão para a perna do sinal de volta ao controlador.
Ao reparar fios de corredor danificados, os 5 fios pequenos para sensores de salão devem ter isolamento de Teflon de alta temperatura (em vez do PVC comum), mas podem ser tão pequenos como 30 AWG se desejar. Devido à corrente de baixo amplificador do sinal Hall, um 24-AWG é bastante gordo. A maioria dos controladores tem apenas uma operação sensorial ou sem sensor, mas … alguns controladores têm ambos: a opção de iniciar como sensored (usando os sensores Hall), o que fornece um controle de velocidade lenta muito bom … e depois mudar para o controle sem sensor. Ter uma opção de controle integrada sem sensor significa que você sempre tem um modo de casa limpa se você superaquecer um dos sensores Hall.
O motor Tidalforce de luxo (que não está mais no mercado ) usou sensores ópticos para informar o controlador sem escovas da posição do rotor. Os disparadores ópticos podem operar em RPMs ultra-altas, mas Tidalforce decidiu usá-los porque eles viram como os sensores de Hall são ocasionalmente danificados pelo calor. Os salões devem estar localizados perto dos ímãs do rotor, e os ímãs do rotor devem estar muito próximos dos polos do estator, e … é o estator que fica quente no motor. Isso significa que os sensores Hall sempre estarão perto das partes quentes.
Os disparadores ópticos podem estar localizados longe do calor. Claro, é melhor evitar gerar calor excessivo em primeiro lugar.
Quando apresentado com a escolha de obter um motor com ou sem sensores Hall … sempre obtenha sensores Hall . Um motor com Halls ainda pode ser executado com um controlador sem sensor, mas os Halls estão lá se você quiser começar a usá-los.
Motores escovados : PMG-132, Agni-95R, Etek (motores escovados não precisam de sensores de posição do rotor, como Halls / optical)
Brushless : Marte, também … há cerca de 5 anos, quase todos os motores do e-bike hub descontinuaram a fabricação de hubs escovados devido a baixas vendas. Brushless tornou-se popular sobre o tempo que os ímãs de neodímio começaram a assumir em motores E-bike, aproximadamente o ano 2000.
____________________________________________________
Por que fase 3?
Os ímãs permanentes em um motor de corrente contínua de ímã permanente (PMDC) são sempre montados lado a lado com faces de pó alternadas apontadas para os pólos do estator. Devido a isso, eles sempre terão um número par de ímãs.
Os eletroímãs (as bobinas de ligar / desligar no estator) são tipicamente dispostos em grupos de três, chamados de “trifásico”. Se você imagina que os 12 números na cara de um relógio são os dentes do estator, então, 1, 4, 7, 10 seriam todos combinados em um dos grupos de fase, e aqueles quatro seriam energizados e desenergizados a o mesmo tempo. Seguindo este padrão, 2, 5, 8, 11 seria o segundo grupo de fases, e 3, 6, 9, 12 seria o terceiro grupo de fases.
Um motor de fase única DIY pode ser um projeto educacional para iniciantes. Eles são simples de construir e entender. No entanto, eles não funcionam sem problemas, já que cada pólo no motor é energizado e desenergizado ao mesmo tempo. Eu vi motores de 5 fases e até 7 fases ( Falco e Fisher & Paykel ) … e anunciam-se como sendo mais suaves e mais eficientes.
Embora os motores de 5 fases / 7 fases possam ser um pouco melhores, eles também são mais complexos e mais caros. Não há nenhum mistério para a popularidade dos motores trifásicos. Eles são razoavelmente suaves e eficientes em operação (muito mais lisos do que uma fase única) e são mais simples e menos caros que os motores de 5 fases.
_____________________________________________________
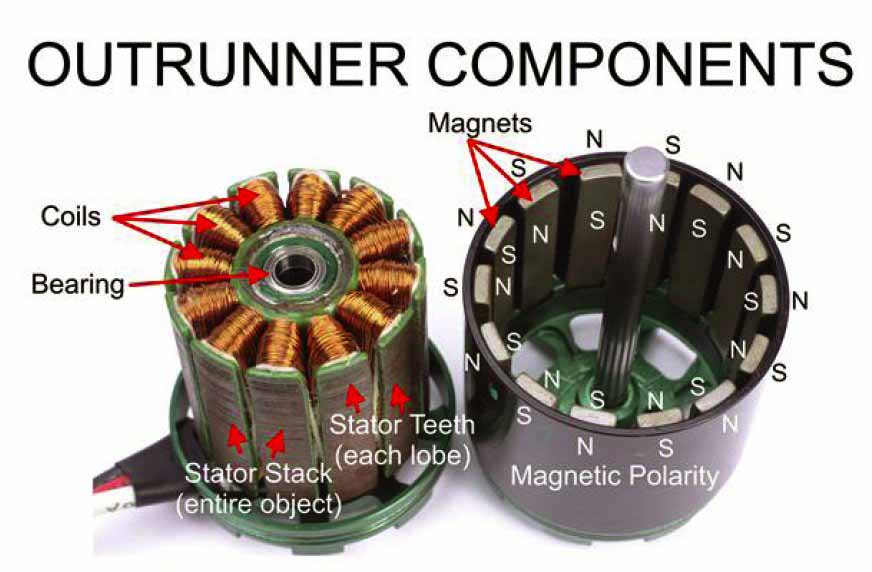
Inrunner ou Outrunner
Um inrunner é o estilo comum de motor que a maioria das pessoas vê em uma base regular. O invólucro exterior está parado, e o rotor giratório tem os ímãs permanentes ligados ao centro do motor. Um outrunner é uma configuração bastante estranha. O estator com suas bobinas de cobre está no centro e estão presos a uma das placas de extremidade. O eixo, o casco exterior e os ímanes permanentes (dentro da casca) são as peças giratórias. Outrunners são comuns em modelos de modelos de Rádio Controlado (RC).
Os 80-100 RC outrunner (80mm de diâmetro e 100mm de comprimento), e os 80-85 foram utilizados muitas vezes em projetos personalizados de bicicletas elétricas. Os controladores para eles são muito pequenos (mas caros!). Os outrunners RC de 63 mm de diâmetro foram usados em unidades de fricção E-bike, e também skates motorizados.
Na figura acima, um GNG à esquerda foi dimensionado para coincidir com o diâmetro do MAC à direita. Uma vez que as bobinas são mais altas do que os ímãs finos, e a configuração de outrunner coloca o fluxo magnético que é o espaço entre os ímãs permanentes e as bobinas mais próximas da borda do motor … isso coloca a aplicação de energia tão longe do eixo quanto possível.
Isso melhora o torque-por-watt aplicado ao motor devido à alavancagem extra, chamado “raio de espaço livre”. Este é um grande benefício para os pequenos motores. No entanto, isso também significa que as bobinas quentes em um outrunner derramarão seu calor no núcleo, o que tipicamente não derrama o calor dos motores muito bem para o ar exterior.

Com um inurlador, o diâmetro relativamente pequeno do rotor (no centro) deve girar mais RPMs para fornecer o mesmo poder (em comparação com um outrunner de diâmetro igual). Isso significa que um invasor deve às vezes confiar em uma grande redução externa (cintos e correntes) para obter a velocidade de saída para os RPMs da roda. Lembre-se, uma roda de 26 polegadas a 26-MPH gira apenas 333-RPM, enquanto … os motores elétricos geralmente funcionam de forma muito eficiente perto de 3.000 RPMs.
Um dos benefícios de um invasor é que, uma vez que as bobinas quentes estão ligadas ao invólucro exterior estacionário, eles geralmente pulverizam calor para o ar exterior.
Inrunners : Astro, GNG, Transmagneticos, unidades médias, como a Bosch, Panasonic e BBS02 / BBSHD.
Outrunners : a maioria dos motores do e-bike hub (seja direcionado ou Direct-Drive), a maioria dos motores RC como o Turnigy.
_____________________________________________________
Kv e “Turn Count”
Há uma certa quantidade de espaço aéreo em torno de cada “dente” de estator de aço em um motor de um determinado tamanho. Você poderia preencher esse espaço com várias voltas de fio fino, ou … menos voltas de fio mais gordo. Um motor de “contagem de rotações” baixa girará mais rápido por cada volt que você aplicar, e um motor de alta contagem de rotações girará mais devagar.
Isso é chamado de “Kv”, de “velocidade de Konstant ” (não sei por que, mas envolve pesquisadores alemães no final dos anos 1800). O poderoso Kv da Cromotor é 9,3 RPMs por volt. Então … 10V giraria um Cro a 93 RPMs e … 100V girariam 930 RPMs. Você pode trocar os motores Kv removendo os fios do estoque e re-enrolando-o com um diâmetro de fio diferente, ou re-terminando as fases de Delta para Wye / Star.

A maioria dos kits de E-bike armazenará apenas os dois Kv mais populares de um determinado motor, e às vezes são mal chamados de “velocidade” e “torque” para simplificar os clientes para decidir. A empresa QS possui muitos Kv’s de seus motores de hub populares. A fábrica de Bafang produz o seu popular hub BPM em novediferentes Kv’s, mas a maioria dos varejistas possui apenas os dois modelos mais populares.
Kv = Velocidade Constante
kV = kilo-Volt (1.000 volts)
__________________________________________________________
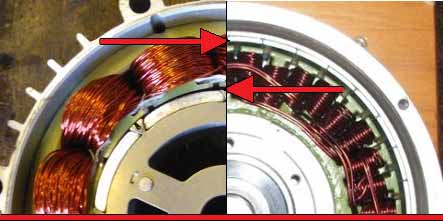
Contagem de pólo alto, contagem de pólo baixo.

Na imagem acima, você pode ver imediatamente a diferença visual entre um motor de contagem de pó alto e uma contagem de pó baixa. O benefício do motor (mais caro) de alta contagem de pólos é que, se você quiser a opção de usar um controlador sem sensor, ter muitos pólos pequenos proporcionará uma decolagem suave de uma parada.
No entanto, se você achar que você pode tentar uma tensão mais alta mais tarde (o que fará o motor girar mais rápido), você pode achar que o motor de contagem alta seja limitado na frequência de comutação elétrica (quão rápido cada fase deve ser ligado e desligada) ao usar controladores comuns.
E então há a questão das perdas de correntes de Foucault. As correntes de Foucault são muito complexas para explicar completamente aqui, só sei que para RPMs muito altas, você precisa de laminagens mais finas e uma contagem de pólo inferior, ou … você alcançará um certo RPM (diferente para cada design do motor) aumento de calor aparentemente inexplicável.
Um exemplo disto é o popular hubmotor BMC geared. O modelo padrão funciona bem em 36V e 48V. Mas quando os construtores começaram a usá-lo em 60V e 72V (o que o faz girar mais rápido), alguns deles encontrariam picos de calor quando estavam em seus RPMs mais altos (causados por correntes de Foucault e uma alta freqüência de comutação). Ilia no ebikessf.com atualizou os hubmotors com base em BMC com laminagens mais finas para construtores que desejam executar RPMs mais elevados.

Um núcleo de estator deve ser feito de algum tipo de aço, mas não são blocos sólidos. O estator é feito de muitas fatias finas (chamadas laminações) que são empilhadas juntas para dar forma final. Laminação com espessura de 0,50 mm são comuns e muito acessíveis (devido ao alto volume de produção).
Os lams mais finos (e um pouco mais caros) de 0,35 mm de espessura são a próxima atualização comum, mas recentemente vi alguns motores serem produzidos com 0,27 mm de lams. O motor Joby de alta eficiência (já não feito) é capaz de 10.000 RPM, e usa lams espessos de 0,20mm.
As laminações de alta RPM também possuem um maior teor de silício no seu aço. Não sei por que isso ajuda a correr mais legal … mas sim. Uma liga de silício típica para laminagens seria de cerca de 3% de Si. Uma liga de 4% -6% de Si-steel pode ser encontrada, mas … também torna o aço muito quebradiço e difícil de formar, então … 3% O silício em lams de motor de aço é comum.
____________________________________________________________
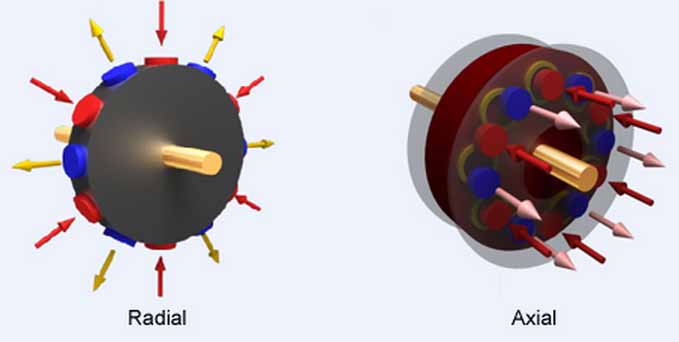
Axial ou Radial
Os motores axiais são raros, quase todos os motores que você pode encontrar no mundo da bicicleta elétrica serão radiais. O motor Agni é um dos poucos motores axiais ao redor, e ele funciona bem (projetado por Cedric Lynch ).
Eu acredito que a razão pela qual tantos motores são de fluxo radial é porque uma fábrica pode fazer vários tamanhos de motor e níveis de energia simplesmente fazendo a pilha de estator mais longa ou mais curta. Houve exemplos de motores de fluxo axial que adicionaram mais stators e rotores ao mesmo eixo, mas duplica o tamanho … em vez de permitir que uma família de motor tenha muitos passos pequenos na faixa de tamanho.
Aqui é um vídeo de um pequeno fluxo axial de uma construção e operação muito semelhantes aos Agni, PMG e Etek escovados (o Marte é quase idêntico, mas é sem escova). O vídeo mostra apenas um estator de ímã permanente, mas esses motores listados possuem dois estatores com um único conjunto de bobinas de rotor giratório no centro. Anote as duas escovas carregadas com mola no início (feitas de carbono).
Uma vez que a área central dentro de um motor de fluxo radial comum não possui ímãs ou eletroímãs, um fluxo axial de mesmo diâmetro e largura teria mais interações magnéticas. Isso faz um fluxo axial mais poderoso por volume, o que também significa … você poderia obter a mesma potência de saída dos mesmos watts de entrada com um Axial ligeiramente menor, em comparação com um radial maior.
Axial = Agni-95R, PMG-132, Mars, Etek
Radial = Quase todos os motores do e-bike, motores RC, Astro, GNG, Transmagnetics